다익스트라 알고리즘(Dijkstra's Algorithm)
다익스트라 알고리즘은 시작점으로 부터 나머지 정점까지 최단거리를 구할 때 사용한다. 주로 네트워크 경로 설계에 많이 적용된다.
(ex) OSPF(Open Shortest Path First)라는 IP 망에서의 라우팅 프로토콜.
간선에 가중치가 있는 그래프에서 1:N 최단거리를 구하는 알고리즘이다. 다익스트라 알고리즘은 너비우선탐색(BFS)을 기본으로 한다. 이때 가중치는 음수값을 갖지 않는다.
구현방법
다익스트라 알고리즘은 각각의 정점에 대해서 정점 s에서 정점 v까지의 최단 거리를 d[v]에 저장하면서 탐색한다. 알고리즘 시작 시에 d[s] = 0이고, s가 아닌 다른 모든 정점에 대해서는 d[v] = ∞ 로 놓아 다른 정점에 대해서는 아직 최단 경로를 모른다는 것을 표시한다. 알고리즘이 종료되었을 때 d[v]는 s에서 v까지의 최단 경로의 거리를 나타내게 되고, 만약 경로가 존재하지 않으면 거리는 여전히 무한대로 남는다.

다익스트라 알고리즘은 다음과 같다. G[A][B]는 A와 B 사이의 거리라고 하자.
출발점으로부터의 최단거리를 저장할 배열 d[v]를 만들고, 출발 노드에는 0을, 출발점을 제외한 다른 노드들에는 매우 큰 값 INF(자료형의 최대값)를 채워 넣는다.
현재 노드 A에 출발 노드를 저장한다.
A로부터 갈 수 있는 임의의 노드 B에 대해,
d[A]+G[A][B]와 d[B]의 값을 비교한다.만약
d[A]+G[A][B]가 더 짧다면, d[B]의 값을 이 값으로 갱신시킨다. (edge relaxtion)모든 이웃 노드 B에 대해 이 작업을 수행한다.
A의 상태를 "방문 완료"로 바꾼다. 그러면 이제 더 이상 A는 사용하지 않는다.
"미방문" 상태인 모든 노드들 중, 출발점으로부터의 거리가 제일 짧은 짧은 노드 하나를 골라서 그 노드를 A에 저장한다.
모든 노드를 순회해 거리가 제일 짧은 노드를 찾아야한다. 이때 우선순위큐를 활용하면 이 비용을 줄일 수 있다.
도착 노드가 "방문 완료" 상태가 되거나, 혹은 더 이상 미방문 상태의 노드를 선택할 수 없을 때까지, 3~7의 과정을 반복한다.
도착 노드에 저장된 값이 A로부터의 최단거리이다. 만약 도착노드의 값이 INF라면, 중간에 경로가 끊긴 것을 의미한다.
edge relaxation?
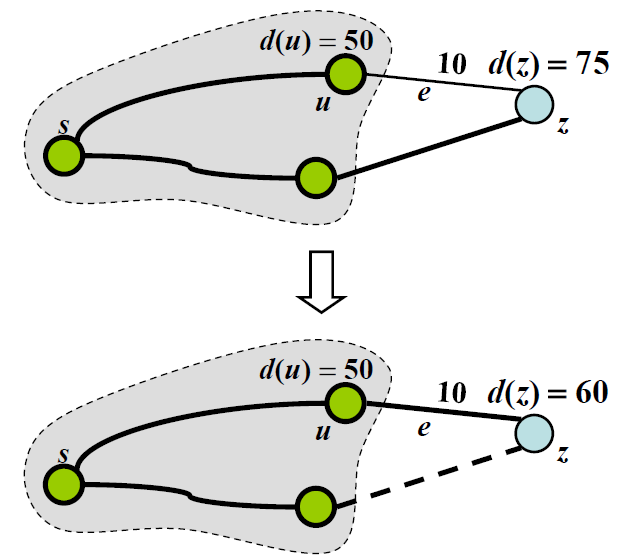
기존의 d(z)가 75였는데 탐색 과정에서 d(u)+e = 60으로 길이가 더 짧을 때, 노드와 엣지의 정보를 업데이트 해주는 것을 말한다.
구현
인접행렬
인접 리스트
최소힙(minheap)은 우선순위큐로 아직 포함되지 않은 정점으로 부터 최소 거리 정점을 가져온다.
크기 V(그래프 정점 수)의 최소 힙을 생성 ( 정점 번호, 정점의 거리 값 포함 )
src를 시작 루트로 하여 최소힙을 초기화한다. (src->src의 거리는 0, 나머지는 INF)
최소힙이 빌때까지 반복해서 수행한다.
최소 거리값 정점을 추출(u)한다.
추출된 정점(u)의 모든 인접한 정점(v)에 대해서 v가 최소힙에 있는지 확인한다. 최소 힙에 있고, 거리값이 u+v의 가중치보다 작다면 distance를 업데이트한다.
단점

가중치가 음수인 경우 처리할 수 없다.

출발점으로부터 거리가 가까우면서 동시에 도착점의 방향과 무관한 점들의 최단 경로를 먼저 찾는 헛수고를 하는 경우가 있다. 출발점이 a이고 도착점이 d일 때, 다익스트라 알고리즘은 도착점과 무관한 방향에 있는 점 e, f, g, h, i 모두의 최단 경로를 찾은 후에서야 도착점 d를 향해 최단 경로 찾기를 수행한다.
Last updated